Getting started
A word about Power LEDs and Lumens
The following projects heavily use power LEDs. They are typically made by manufacturers such as Philips-Lumileds, Cree, Seoul Semiconductor. At the time of writing, these LEDs are subject of rapid improvement. In 6 months from now, a new model of power LED will probably make todays most advanced LEDs look dim. There could even be new manufacturers pushing on the market with superiour LEDs. Due to this, I never recommend any specific part number for the LEDs. The driver circuits are not affected by the type of LED used, as long as it has the typical forward voltage of a white LED. You might want to know what sort of light output to expect from the circuits on this page. Well, you will only find LED power here. To know the Lumens, you have to download the datasheet of your LED of choice and look up how many Lumens it delivers for the Watts you feed it.In order to build a bright light, you have to pay attention to three parts: The driver circuit (better if it delivers more power), the LEDs (better if they produce more Lumens per Watt), and the optics / reflectors / lens (better if their efficiency is closer to 100%).
Circuit 1 - a basic LED headlight
 |
| ||||||||||||||||||
The AC from the dynamo passes a full-wave rectifier and feeds the single power LED of the headlight.
The LED current is reliably limited by the dynamo to about 500..600mA. Be sure that the LED can take this.
Silicon diodes (1N4007) do the job, while Schottky diodes (1N5818) minimze circuit losses.
This circuit works for both bottle dynamos and hub dynamos. It produces a little over 1.5W of LED power.
Above circuit has one little issue: The light flickers at low speed, particularly if powered from a hub dynamo. Here's what to do about it:
Circuit 2 - less flicker at low speed
 |
| |||||||||||||||||||||
C1 needs to withstand at least 4V and there's no upper limit to its capacitance. Well, cost and size are somewhat limiting factors.
The circuit works both for hub and bottle dynamos while hub dynamos require a larger capacitor to reduce the flicker. A word of caution: C1 should be mounted inside the headlight enclosure where it must be properly connected to the LED. Should the LED disconnect from the circuit, C1 charges to a rather high voltage (can be 100V when going fast). This could not only be dangerous to a person's health but upon reconnection to the LED, a dramatic peak current most likely decolors or destroys the LED. This is valid for most circuits on this page.
Adding a tail light
If you prefer to use a battery-powered tail light, skip this sectionCircuit 3 - a basic tail light added to the headlight
 |
| |||||||||||||||||||||
The use of multiple red low-power LEDs (e.g. 15x Osram LS T676) in a parallel connection is an alternative to a power LED.
Any tail light LED has to withstand 5V of reverse-voltage.
To turn the tail light off, shunt it with a rectifier diode.
Circuit 4 - an alternative tail light
 |
|
Another interesting feature is this: The tail light is directly wired to the dynamo terminals, so that a cable that may already be there from a traditional bicycle light can remain attached to the dynamo.
Disadvantages of circuit 4 are the need to define a resistor value, the lower brightness of the tail light and the fact that the tail light is damaged should the headlight disconnect. In the partlist above, a value of 47 Ohm is suggested for R1. The actual value depends on the LEDs used. It's best to build it and measure the tail light current, then correct the value of R1 if a lower or higher LED current is desired. The reverse-voltage of the LEDs is unritical in this circuit.
To turn this tail light off, disconnect it.
Adding some "boost"
Circuits 5 & 6 - a tuning capacitor increases the power at moderate speed
| Circuit 2 for reference | Circuit 5 |
See how this affects the LED power vs speed curve, as the value of C2 varies:

While there's not a big difference at very low and very high speed, the boost in the middle is real nice to have.
Unfortunately, this comes at a price: C2 has to be a non-polarized part and its value is somewhat critical. With a typical bottle dynamo C2 = 220uF works well, with a hub dynamo its capacity would have to be a monstrous 1500uF. The required non-polarized capacitor can be hard to find, real large and somewhat expensive. Circuit 6 gets around this by using two regular (polarized) capacitors instead. Each of these has twice the capacity and should be a low-ESR type, as typically used in switchmode power supplies. Resistor R1 is uncritical, it merely biases C2 and C3.
Circuit 6 |
| ||||||||||||||||||||||||||||||
Multiplying the power
Circuit 7 - driving more than one LED
The dynamo is more or less a constant current source, so when connecting two LEDs in series, the total power output of the system (nearly) doubles. Why not connect 3, 4 or more LEDs in series ?To make the best of it, the tuning capacitors from circuit 6 have been maintained.
 |  |
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Note that the higher output curves not just require more calories to be put in, they also produce very little light at low speed. A 6 LED hub system e.g. puts out zero light at 8 km/h, something that is often not acceptable. Why not jump to a different curve at low speed ? Read on.
Mastering high power and good low-speed performance at the same time
Circuit 8 - inclusion of a voltage doubler
Circuit 7, when used with a higher number of LEDs, suffers from poor power at low speed. This can be seen from the power curves above. Should it be an issue for you, there are several ways to address this:- Some of the LEDs can be bypassed and different tuning capacitors be switched in, so the circuit can be changed into one with fewer LEDs that performs better at low speed.
- Parallel installation of let's say a 6-LED and a 3-LED version. A switch selects the one that is more appropriate. The 6-LED light engine could have a narrow beam for far projection while the 3-LED light engine would have a wider beam for lower speed.
- Switching the bridge rectifier to a voltage doubler, making the circuit behave like one that has half the number of LEDs.

This circuit (minus R1, C2, C3) used to be popular in computer power supplies. On the primary side, it accomplished the 115/230 V selection.
Here's the list of component values for different configurations of circuit 8. Single and dual LED systems are not covered, as their low-speed performance is naturally good and circuit 7 is sufficient.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Let's look at some interesting variations of circuit 8:
Circuit 9 - a variation of circuit 8
 |
Another feature of circuit 9 is the tail light. Unlike in circuit 8, LED1 is red.
Circuit 10 - one more variation of circuit 8
 |
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Similar to circuit 9, a switch with an isolating center position may be used so that the light can be switched off.
Circuit 11 - the voltage quadrupler
If you like to dig a bit deeper into the concept of voltage multiplication, check out my draft of a combined doubler / quadrupler / bridge rectifier.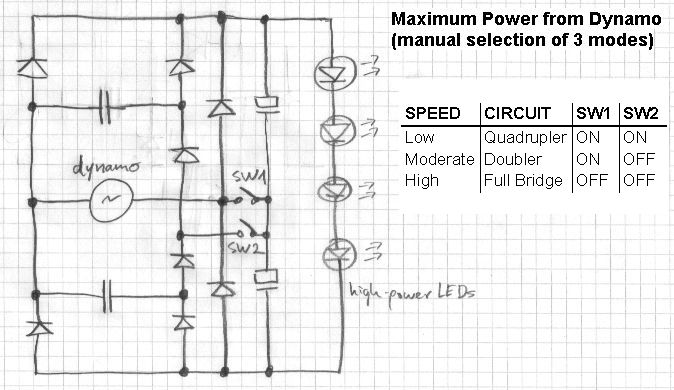{kind=link}
Automatic mode selection
Circuits 8 to 10 achieve high power while still maintaining reasonable brightness at low speed. This is accomplished by switching the bridge rectifier to a voltage doubler when going slow. While this works well, it requires constant user interaction. Some users may like this sort of control, as it enables them to run the light on low while going fast. Most users however just want the maximum light output they can get and rather not mess with the modes of their light while riding. They need automatic switching. It can be done in two ways:- Mechanical coupling of the switch to the shifter / the shifter cable. Depending on the gear chosen, the light operates either in doubler mode (low gear) or in bridge rectifier mode (high gear).
- A speed switch reading the dynamo frequency selects doubler mode at low speed. This is what circuit 12 does.
Circuit 12 - automatic mode selection
 Circuit 12 boasts automatic switching between modes. It consists of 3 basic parts:
Circuit 12 boasts automatic switching between modes. It consists of 3 basic parts: - Power stage: Dynamo, rectifier / doubler, tuning capacitors, LEDs, MOSFET switches Q1 & Q2 with their drivers Q3 & Q4
- Overvoltage crowbar T1, D5, R17
- Speed switch IC1 (LM2907) with mode indicator LD11 and hysteresis switch Q5
The speed switch IC1 contains a freqency-to-voltage converter (f2V) and a comparator. The input of the f2V block is the AC waveform from the dynamo. The switching frequency is set by R15. The output transistor of IC1 controls the base current of the MOSFET driver transistors Q3 and Q4 as well as the indicator LD11.
Q5 slightly shifts the reference voltage of the comparator to induce some hysteresis. This is needed to avoid instability near the switching point. Circuit 12 achieves the same power curves as circuit 8 and it can drive from 3 to 8 power LEDs in series. It is compatible with both bottle dynamos and hub dynamos.
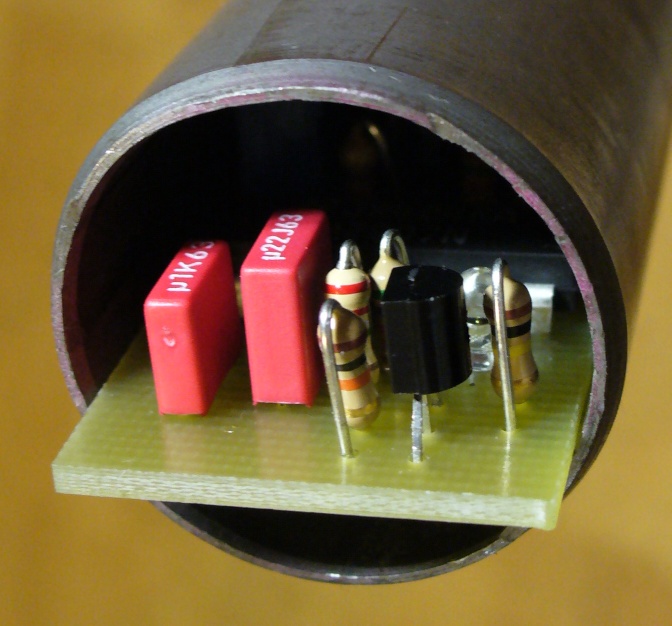
Due to this circuit's complexity, I have made a simple PCB for it. It has been optimized for manual fitting, no SMDs are used. Mechanically, it fits into a 1 1/8" steerer tube with the tuning capacitors C1..4 located off the board (going into the tube first). Smoothing capacitor C5 is meant to go into the headlamp assembly. To learn more about this circuit, download the full documentation and the CAD files (CadSoft Eagle format).
{kind=link}

Here are 2 variations of circuit 12. They also sense the dynamo frequency to select b/w voltage doubler and bridge rectifier mode. They were created to avoid the current surge that occurs in circuit 12 when switching from bridge rectifier to voltage doubler mode. These circuits exist on paper only, they have never been built and component values are either a first bet or rightaway missing. I provide these here to share 2 cost-effective ideas of driving a MOSFET when its source potential is continuously changing vs the driver potential (switching of an AC load).
Alternative concept no.1 for an auto-selecting voltage doubler / bridge rectifier. Not tested, component values undetermined. For electronics wizards only.
{kind=link}
Alternative concept no.2 for an auto-selecting voltage doubler / bridge rectifier. Not tested, component values undetermined. For electronics wizards only.
{kind=link}
Let's move on to an earlier design (bottle dynamo only) that does the automatic mode selection in a slightly different way:
Circuit 13 - a different approach to automatic mode selection
 |
The optimum transition current is set by the 470R potentiometer. The transition current is just below the point where the doubler output current remains constant while speed increases. Ideally, this alignment is done while the dynamo is at operating temperature (where it delivers a little less current than when it's cold). At the transition point, the circuit alternates between both modes. If the transition point is chosen correctly, both modes yield very similar power at this point so that the transition appears smooth.
The power stage of circuit 13 differs from circuit 12 in a way that it uses a Villiard voltage doubler, not a Greinacher voltage doubler. While this reduces component count and simplifies the circuit, flicker at low speed increases. With a bottle dynamo (this is what circuit 13 has been made for), the flicker is not an issue. With a hub dynamo though it is not acceptable. Now that hub dynamos are becoming dominant, I've decided to retire this circuit.
If you like to build circuit 13, I'm not going to stop you. Here's a photo of the assembly, a clean schematic, the PCB and the placement guide. The PCB has been optimized for manual fitting, no SMDs are used. In this version, C07 solders directly to the pins of IC1. Component values have been chosen for 3 white headlight LEDs and 4 red tail light LEDs powered from a Dymotec6 generator.
{kind=link}
{kind=link}
{kind=link}
For the mechanical aspect of your project, take a look at a single LED headlight, a triple-LED headlight and a tail light all built from common parts.
BACK
Hiç yorum yok:
Yorum Gönder